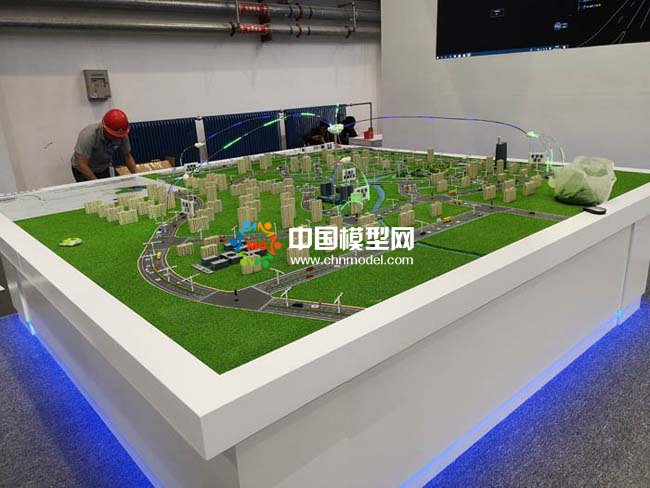
云控自動駕駛沙盤模型,車輛作為交通的主要參與因素,一直在整個交通控制網中處于離線狀態,這主要是因為傳統的交通設施和車輛之間相互獨立,車路之間并沒有形成協同體系,因此無論兩者如何智能化發展,城市的交通出行問題依然無法得到有效解決。

云控自動駕駛沙盤模型駕駛平臺通過將交通與汽車通過標準化協議進行互聯,同時更關鍵的是,云控自動駕駛沙盤模型自主研發的車路協同模型是業內首次將車輛運動的決策與控制以及交通的調控系統協同起來,將車輛的運動決策與控制引入到交通優化中來,從而使得車輛與交通信號之間能夠基于共同的優化目目標的共同發揮作用,真正解決交通出行中存在的各類問題。

車路協同的自動駕駛生態離不開產業鏈的支持,為了讓產業鏈客戶能夠更好的利用超視距感知平臺和云控自動駕駛沙盤模型駕駛平臺來開發支持自動駕駛,以及智慧交通和智慧城市的應用,云控自動駕駛沙盤模型提供了標準化的開發環境,包括各類應用開發中間件,開發函數,開發環境等等。